DIY Arduino Robotic Arm
JUN 2025| Personal Project
Introduction
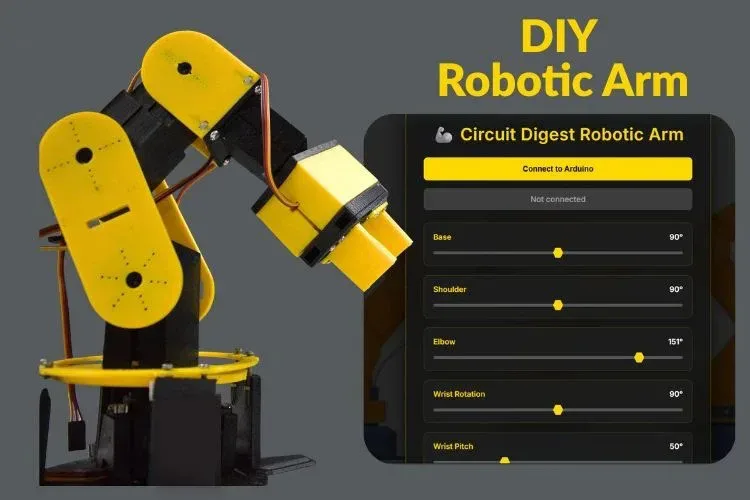
Building a 6-DOF Arduino robotic arm capable of precise pick-and-place operations. Designed for ease of assembly and operation, it includes a complete circuit diagram, Arduino code, and step-by-step instructions. Ideal for learning servo motor control, embedded programming, and the fundamentals of robotics and automation.
Features
• **Inverse Kinematics**: Calculates precise servo angles for smooth foot positioning.
• **Self-Balancing**: Uses IMU data to maintain stability on slopes.
• **Wireless Control**: Operated via a custom mobile app over Bluetooth/WiFi.
• **Self-Balancing**: Uses IMU data to maintain stability on slopes.
• **Wireless Control**: Operated via a custom mobile app over Bluetooth/WiFi.
Tech Stack
ControlLoop.cpp
1// Firmware Control Loop (C++)
2void loop() {
3 readSensors();
4 calculateIK();
5 updateServos();
6 delay(10);
7}